随着车辆技术的发展,消费者对乘车的舒适性和驾驶过程中的操稳性能要求日益提高。但是在目前市场上的电控悬架方案,其现有技术主要采用天棚控制算法。天棚控制算法控制对象是阻尼力,而阻尼力存在突变,存在很多控制不了的区域。这就导致了乘车的舒适性受到了很大影响,使得用户体验差。还会导致操作、控制的稳定性下降,实质上也影响到车辆行驶的平稳性和安全性,甚至影响到车辆的使用寿命。
为此,奇瑞发明专利提供了一种新型汽车电控悬架,采用特定的电控悬架控制算法,通过采集多个传感器信号及通过控制多个模块,为减振器提供阻尼,其控制算法的控制对象是阻尼力系数,可以使得阻尼力平稳变化,满足用户对乘车舒适性、操控稳定性的要求。
电控悬架组成:
")
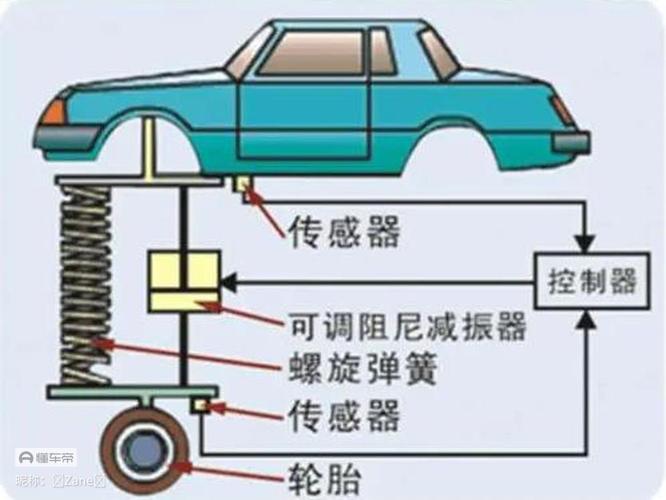
汽车设有前悬架、后悬架和车身地板,前悬架上设置前悬架左减振器、前悬架右减振器,后悬架上设置后悬架左减振器、后悬架右减振器,车身地板上设置平顺性控制单元。前悬架左减振器、前悬架右减振器、后悬架左减振器和后悬架右减振器均通过信号线路与平顺性控制单元连接。
电控悬架还包含三个车身传感器、两个车轮传感器、一个ECU、四个减振器,其中三个车身传感器采集加速度信号,两个车轮传感器采集的是加速度传感器信号,减振器为连续阻尼可调减振器。
1-2、前悬架左-右减振器,8-9、左-右车轮加速度传感器,12、前悬架。
汽车的车轮上设置左车轮加速度传感器和右车轮加速度传感器。左车轮加速度传感器和右车轮加速度传感器均通过信号线路与平顺性控制单元连接。左车轮加速度传感器布置于前悬架左减振器上,监控左前车轮信号。右车轮加速度传感器布置于前悬架右减振器上,监控右前车轮信号。
3-4、后悬架左-右减振器,13、 后悬架。
车身上设置左车身加速度传感器、右车身加速度传感器和后车身加速度传感器,左车身加速度传感器、右车身加速度传感器和后车身加速度传感器均通过信号线路与平顺性控制单元连接。
5、左车身加速度传感器,6、右车身加速度传感器。
左车身加速度传感器布置于左前竖板总成,监控左前车身信号,右车身加速度传感器布置于右前竖板总成,监控右前车身信号,后车身加速度传感器,布置于左柱下连接板,监控后车身信号。平顺性控制单元布置于车身地板上上。
7、后车身加速度传感器,10、平顺性控制单元,11、车身地板。
电控悬架的电路图如图所示:其中操稳调校适用于操稳调校专用,调校完毕适用于调校完毕后使用。该电路图中还包括左车身传感器电控模块、右车身传感器电控模块、后车身传感器电控模块、左车轮传感器电控模块、右车轮传感器电控模块、左前减振器电控模块、右前减振器电控模块、左后减振器电控模块、右后减振器电控模块。
501、操稳,502、完毕,503-505、车身传感器电控模块,506-507、车轮电控模块,508-511、减振器电控模块。
电控悬架的技术方案为:整车的控制策略是由不同的控制模块组成,如图所示:汽车电控悬架的控制系统包括车身控制模块、操控控制模块、非簧载阻尼控制模块、行程控制模块、随速控制模块和组合控制模块。
车身控制模块主要控制由路面引起车身起伏、侧倾和俯仰动作,典型工况为乡村路,控制逻辑为:通过三个车身加速度,评估车身运动状态,判断整车是侧倾、俯仰还是平跳。通过整车速度、车身车身加速度以及车身和车轮相对位置作为输入,对车身运动进行评估、控制,并输出车身控制命令。要求:控制需要的阻尼力根据估计的车身和悬架运动进行控制。
操控控制模块主要控制侧倾和俯仰包括防侧倾操控控制、抗点头操控控制和抗抬头操控控制。
一、防侧倾操控控制,典型工况为转弯、双移线,控制逻辑为:通过整车速度和方向盘转角,判断侧向加速度,并和横摆角速度作为输入,驱动防侧倾控制,并输出控制命令。要求:控制需要的阻尼力随纵向加速度的增加而增加。
二、抗点头操控控制,典型工况为制动,控制逻辑为:通过整车速度、变速箱档位、发动机扭矩、制动压力,评估纵向加速度。将纵向加速度与整车速度作为输入,驱动抗点头控制,并输出控制命令。要求:控制需要的阻尼力随纵向加速度的增加而增加。
三、抗抬头操控控制,典型工况为加速,控制逻辑为:通过整车速度、变速箱档位、发动机扭矩、油门踏板开合角度,评估纵向加速度。纵向加速度与整车速度作为输入,驱动抗抬头控制并输出控制命令。要求:控制需要的阻尼力随纵向加速度的增加而增加。
非簧载阻尼控制模块主要控制簧下车轮的振动,典型工况为破损路面,控制逻辑为:通过悬架运动信息、整车速度,驱动非簧载质量阻尼控制,并输出控制命令。要求:通过非簧载质量阻尼控制,改善抖动后的车轮。
行程控制模块主要控制行程、减少冲击,通过行程控制降低冲击噪音,典型工况为大起伏路面控制逻辑为:通过悬架运动信息、整车速度,驱动悬架行程控制,并输出控制命令。要求:通过行程控制,降低冲击噪音。
随速控制模块主要提高车辆在高速、高横向加速度下的稳定性,进行基础阻尼力控制,典型工况为高速工况,控制逻辑为:通过侧向加速度、整车速度,驱动随速控制,并输出控制命令。要求:控制需要的阻尼力随侧向加速度的增加而增加。
车辆状态评估的逻辑框图主要体现在:
一、通过车轮传感器和车身传感器的方向和大小,评估道路的使用工况;
二、主要使用CAN信号,推测出车辆运动方式,主要是纵向、侧向和横摆;
三、利用加速度传感器信号和CAN信号评估悬架运动。
电控悬架的控制方法:
一、车辆受到路面激励,各车身加速度传感器和各车轮加速度传感器获得车身加速度和车轮加速度信号,车身采集加速度传感器信号,车轮采集加速度传感器信号。通过对车身加速度信号进行积分,可以获得车身振动速度,对车身加速度信号进行积分,可以获得车轮振动速度。为了使传感器测量的信号更加准确,使用卡尔曼滤波进行修订。通过卡尔曼滤波即可观测到悬架的相对运动状况。
二、通过悬架相对速度,应用控制策略计算最优的的阻尼力输出值;
三、由于最优阻尼力输出值可能超过可调阻尼减振器的阻尼力输出范围,因此需要经过阻尼力约束得到实际阻尼力输出,再经过减振器逆向模型将最优阻尼力换算为电流控制的可调减振器阻尼值输出。
平顺性控制单元对各电控减振器系统控制流程如图所示:
一、基于车辆动力学响应,逆向识别路面,即使用三个车身加速度传感器、两个车轮加速度传感器,通过车身加速度传感器信号和车轮加速度传感器信号的相对位置和相对速度,推断整车路面工况;
根据路面工况以及不同行驶条件,整车ECU进行整车状态评估,包括:第一、通过车轮传感器和车身传感器的方向和大小,评估道路的使用工况;第二、主要使用CAN信号,推出车辆运动方式,主要是纵向、侧向和横摆;第三、利用加速度传感器信号和CAN信号评估悬架运动。
二、根据整车状态评估,调用不同的控制模块;
三、通过减振器速度、减振器电流,推断出需要的减振器阻尼;
四、实现减振器的半主动可调;增益计算,主要是操稳调校标定变量。
综上所述:电控悬架满足用户对乘车舒适性、操控稳定性的要求,采用特定的电控悬架控制算法,通过采集多个传感器信号及通过控制多个模块,为减振器提供阻尼,控制算法的控制对象是阻尼力系数,可以使得阻尼力平稳变化,为用户提供更好的乘车体验。
总结:
奇瑞汽车电控悬架中的前悬架上设置前悬架左减振器、前悬架右减振器,后悬架上设置后悬架左减振器、后悬架右减振器,车身地板上设置平顺性控制单元。前悬架左减振器、前悬架右减振器、后悬架左减振器和后悬架右减振器均通过信号线路与平顺性控制单元连接。该技术方案满足用户对乘车舒适性、操控稳定性的要求。采用特定的电控悬架控制算法,通过采集多个传感器信号及通过控制多个模块,为减振器提供阻尼,其控制算法的控制对象是阻尼力系数,可以使得阻尼力平稳变化,为用户提供更好的乘车体验。


工作时间:8:00-18:00
电子邮件
扫码二维码
获取最新动态
